
CK3M et CK5M
Contrôleur multi-axes programmable
Le contrôle multi-axes avec un temps de cycle de servomoteur ultra-rapide de 50 µs/5 axes permet un usinage de précision
- Axes locaux pour une précision à l'échelle nano
- Contrôle synchrone ultra-rapide (50 µs/5 axes)
- Algorithmes de servo-régulation personnalisés
- Flexibilité d'utilisation des encodeurs et actionneurs provenant de plusieurs fabricants
- Flexibilité de programmation des langages Code G et ANSI C, ou d'un langage de programmation d'origine
- EtherCAT pour une configuration flexible
- Conception modulaire et montage sur rail DIN
Caractéristiques et références
| Produit | Type of module | Max. number of axes via EtherCAT | Max. number of axis interface units | Amplifier interface | Encoder interface | Digital output type | Number of digital inputs | Number of digital outputs | Number of analog inputs | Description | |
|---|---|---|---|---|---|---|---|---|---|---|---|
|
|
Motion control | 0 | 4 | 0 | 0 | 0 | CPU CK3M, 1 Go de RAM, 1 Go de mémoire Flash, sans EtherCAT. Jusqu'à deux unités d'interface d'axe peuvent être connectées. Des unités d'extension peuvent être connectées. |
|
|||
|
|
Motion control | 4 | 4 | 0 | 0 | 0 | CPU CK3M, 1 Go de RAM, 1 Go de mémoire Flash, 4 axes EtherCAT. Jusqu'à deux unités d'interface d'axe peuvent être connectées. Des unités d'extension peuvent être connectées. |
|
|||
|
|
Motion control | 8 | 4 | 0 | 0 | 0 | CK3M processeurs, 1 Go de RAM, 1 Go de mémoire Flash, 8 axes EtherCAT. Il est possible de connecter jusqu'à deux unités d'interface d'axe. Les unités d'extension peuvent être connectées. |
|
|||
|
|
Analog I/O | 4 | CK3W ENTRÉES analogiques, 4 points, +/-10 V, 16 bits (pleine échelle) |
|
|||||||
|
|
Analog I/O | 8 | CK3W ENTRÉES analogiques, 8 points, +/-10 V, 16 bits (pleine échelle) |
|
|||||||
|
|
Axis interface | DirectPWM output | Digital quadrature / Serial | NPN | Unité d'interface CK3W 4 axes, encodeur numérique, DirectPWM, NPN |
|
|||||
|
|
Axis interface | DirectPWM output | Digital quadrature / Serial | PNP | Unité d'interface CK3W 4 axes, encodeur numérique, DirectPWM, PNP |
|
|||||
|
|
Axis interface | Filtered PWM | Digital quadrature / Serial | NPN | Unité d'interface à 4 axes CK3W, sortie numérique analogique (MLI Filtré), impulsion + direction ou différence de phase, codeur d'impulsions / codeur série, type de sortie NPN |
|
|||||
|
|
Axis interface | Filtered PWM | Digital quadrature / Serial | PNP | Unité d'interface à 4 axes CK3W, sortie numérique analogique (MLI Filtré), impulsion + direction ou différence de phase, codeur d'impulsions / codeur série, type de sortie PNP |
|
|||||
|
|
Axis interface | True DAC | Digital quadrature / Serial | NPN | Unité d'interface à 4 axes CK3W, sortie numérique analogique (True DAC), impulsion + direction ou différence de phase, codeur d'impulsions / codeur série, type de sortie NPN |
|
|||||
|
|
Axis interface | True DAC | Digital quadrature / Serial | PNP | Unité d'interface à 4 axes CK3W, sortie DA (DAC véritable), impulsion + direction ou différence de phase, codeur d'impulsions / codeur série, type de sortie PNP |
|
|||||
|
|
Axis interface | DirectPWM output | Sinusoidal / Serial | NPN | Unité d'interface CK3W 4 axes, encodeur sinusoïdal, DirectPWM, NPN |
|
|||||
|
|
Axis interface | DirectPWM output | Sinusoidal / Serial | PNP | Unité d'interface CK3W 4 axes, encodeur sinusoïdal, DirectPWM, PNP |
|
|||||
|
|
Encoder input | Not Applicable | Special Serial Protocol | Unité d'entrée codeur pour CK3M, codeur série 4 canaux, BiSS-C, Endat2.2 et codeur intégré au moteur R88M-1Lx/-1Mx |
|
||||||
|
|
Laser interface | Not Applicable | Not Applicable | PWM, XY2-100 | Unités d'interface laser pour CK3M, protocole XY2-100, sortie PWM laser |
|
|||||
|
|
Laser interface | Not Applicable | Not Applicable | PWM, TCR, XY2-100 | Unités d'interface laser pour CK3M, protocole XY2-100, sortie PWM laser et sortie TCR |
|
|||||
|
|
Laser interface | Not Applicable | Not Applicable | PWM, SL2-100 | Unités d'interface laser pour CK3M, protocole SL2-100, sortie PWM laser |
|
|||||
|
|
Laser interface | Not Applicable | Not Applicable | PWM, SL2-100, TCR | Unités d'interface laser pour CK3M, protocole SL2-100, sortie PWM laser et sortie TCR |
|
|||||
|
|
Digital I/O | NPN | 16 | 16 | CK3W E/S NUMÉRIQUES, ENTRÉE/SORTIE : 16/16, NPN |
|
|||||
|
|
Digital I/O | PNP | 16 | 16 | CK3W E/S NUMÉRIQUES, ENTRÉE/SORTIE : 16/16, NPN |
|
En quoi pouvons-nous vous aider ?
Pour toute question ou demande de devis, veuillez nous contacter ou envoyer une demande.
Contactez-moi CK3M et CK5M

Merci de votre demande. Nous reviendrons vers vous dès que possible.
Nous rencontrons des problèmes techniques. Votre demande ne peut être traitée. Veuillez nous excuser et ré-essayer plus tard. Détails :
DownloadDevis pour CK3M et CK5M
Vous pouvez utiliser ce formulaire pour demander un devis sur le produit de votre choix. Merci de compléter tous les champs *. Les informations sont traitées de manière confidentielle.
Merci de votre demande. Nous vous enverrons l'information demandée au plus tôt.
Nous rencontrons des problèmes techniques. Votre demande ne peut être traitée. Veuillez nous excuser et ré-essayer plus tard. Détails :
DownloadFonctions

Conception modulaire
La conception modulaire vous permet de combiner librement les contrôleurs CK3M avec jusqu'à deux unités d'interface d'axe pour mettre en œuvre de nombreuses applications.
Power PMAC IDE ((Integrated Development Environment, environnement de développement intégré)
- Basé sur Microsoft® Visual Studio®
- ANSI C ou langage de programmation d'origine
- Réglage aisé
- Paramètres simples
- Dépannage
- Débogueur
Cinématiques complexes
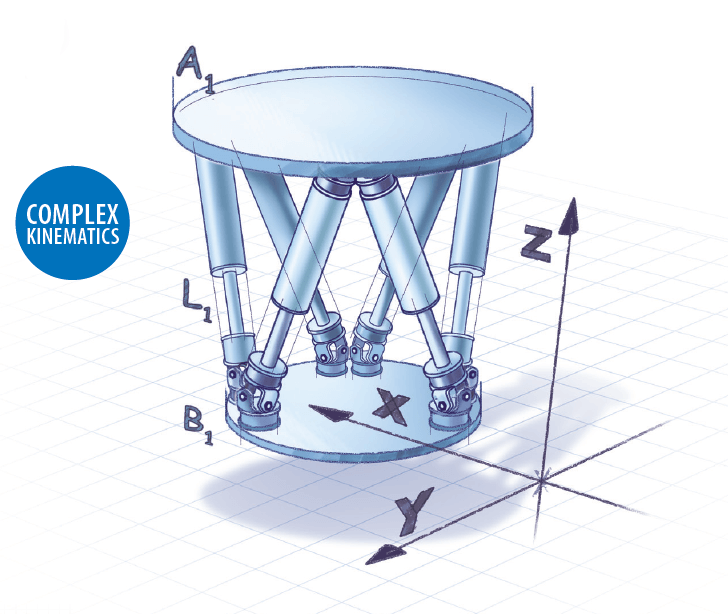
La gestion des matrices et de la conversion de l'espace permet la prise en charge de mécaniques complexes. Des applications spécifiques, comme le positionnement des miroirs de télescope Hexapod, peuvent être contrôlées aisément grâce à la fonctionnalité de gestion des cinématiques.
Des fonctionnalités innovantes pour des applications mécaniques précises
Code G
Interprète de code G RS-274 standard. Sous-routines accessibles en écriture par les utilisateurs pour la mise en œuvre personnalisée de codes G, M, T et D. Possibilité d'adapter la syntaxe et de travailler en association avec n'importe quel logiciel de CAO/Came.
Compensation de découpe 2D/3D
Compensation de la forme et du diamètre de l'outil pour une correspondance exacte avec le point de découpe indiqué en code G.
Processeur rapide + grande mémoire tampon de programme
Le processeur rapide peut traiter plus de 10 000 blocs par seconde et jusqu'à 1 Go de programmes pièces.
Reconstitution de bloc pour inverser la trajectoire
La trajectoire peut être inversée pour retirer l'outil de la zone de découpe.
Vision avancée des blocs
Les instructions présentes dans la mémoire tampon sont analysées à l'avance, les mouvements sont fluidifiés et optimisés en termes de vitesse et d'accélération pour une meilleure performance.
Gestion des outils avec tangente
Les outils présentant une direction de découpe nécessitent le positionnement d'une trajectoire tangente.
Logiciel
Power PMAC IDE
Ce logiciel informatique est utilisé pour configurer et créer des programmes utilisateur ainsi que pour déboguer les programmes des contrôleurs multi-axes programmables NY51-A et CK3E.
Produits liés
-

Contrôleur multi-axes programmableCK3E
-

Performance et aspect pratique du contrôle des machines
-

Servo à usage universel Sysmac
Téléchargements

















_getting_started_guide_en.jpg)
