
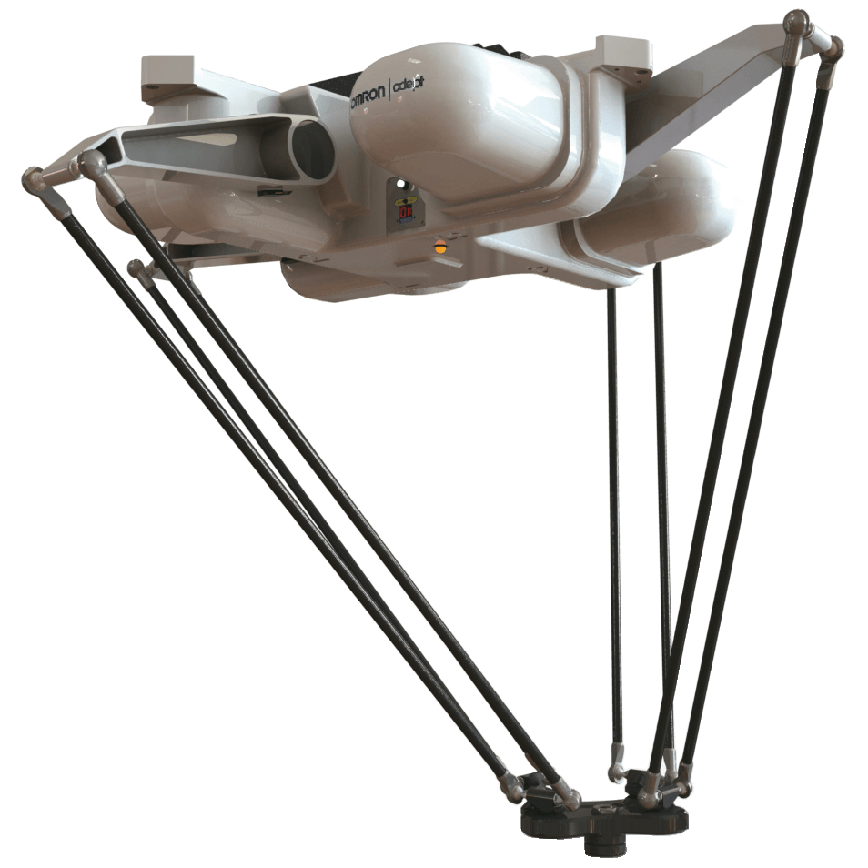
Quattro
Le robot parallèle à quatre axes permet d'atteindre une vitesse élevée et une haute précision
- Compatibilité Ethernet pour contrôler le robot via le langage de programmation courant des contrôleurs de machines de série NX/NJ (IEC 61131-3)
- Système de bras à quatre axes pour une distribution égale de la charge sur le robot
- Convoyage et assemblage rapide et haute précision
- Conçu avec une charge utile élevée pour une utilisation à plusieurs bras (ramassage multiple)
- Le modèle 650HS est agréé par l'USDA pour la manipulation des denrées alimentaires primaires
- Modèles de plage de fonctionnement 1 300 et 1 600
- Jusqu'à 15 kg de charge utile maximum
- Classe de protection IP65 (IP66 les modèles HS)
Caractéristiques et références
| Produit | Payload | Reach | Robot controller | Z-Stroke | Degree of protection (IP) | Rotation -/+ | Platform type | Description | |
|---|---|---|---|---|---|---|---|---|---|
|
|
15 kg | 650 mm | EX Controller | 500 mm | IP20 | 0 ° | P30 | Robot Quattro ePLC650H P30 (complémentaire), rotation 0°, 15 kg de charge utile, portée 1 300 mm de dia., axe Z 500 mm, base IP20, outillage, IP67 |
|
|
|
6 kg | 650 mm | EX Controller | 500 mm | IP20 | 46.25 ° | P31 | Quattro 650H, module complémentaire, charge utile de 6 kg, portée de 1300 mm de diamètre, P31, rotation de 46,25°, 4 axes, axe Z 500 mm, base IP20, outillage IP67, ePLC |
|
|
|
6 kg | 650 mm | EX Controller | 500 mm | IP20 | 92.5 ° | P32 | Quattro 650H, module complémentaire, charge utile de 6 kg, portée de 1300 mm de diamètre, P32, rotation de 92,5°, 4 axes, axe Z 500 mm, base IP20, outillage IP67, ePLC |
|
|
|
6 kg | 650 mm | EX Controller | 500 mm | IP20 | 185 ° | P34 | Robot Quattro ePLC650H P34 (complémentaire), rotation 185º, 6 kg de charge utile, portée 1 300 mm de dia., axe Z 500 mm, base IP20, outillage IP67 |
|
|
|
8 kg | 650 mm | EX Controller | 500 mm | IP67 | 0 ° | P30 | Robot Quattro ePLC650HS P30 (complémentaire), rotation 0°, 15 kg de charge utile, portée 1 300 mm de dia., axe Z 500 mm, base IP66, outillage, IP67, USDA |
|
|
|
3 kg | 650 mm | EX Controller | 500 mm | IP67 | 46.25 ° | P31 | Robot Quattro ePLC650HS P31 (complémentaire), rotation 46,25°, 6 kg de charge utile, portée 1 300 mm de dia., axe Z 500 mm, base IP66, outillage, IP67, USDA |
|
|
|
3 kg | 650 mm | EX Controller | 500 mm | IP67 | 92.5 ° | P32 | Robot Quattro ePLC650HS P32 (complémentaire), rotation 92,5°, 6 kg de charge utile, portée 1 300 mm de dia., axe Z 500 mm, base IP66, outillage, IP67, USDA |
|
|
|
3 kg | 650 mm | EX Controller | 500 mm | IP67 | 185 ° | P34 | Robot Quattro ePLC650HS P34 (complémentaire), rotation 185°, 6 kg de charge utile, portée 1 300 mm de dia., axe Z 500 mm, base IP66, outillage, IP67, USDA |
|
|
|
15 kg | 650 mm | EX Controller | 500 mm | IP65 | 0 ° | P30 | Quattro 650H, IP65, P30, complémentaire |
|
|
|
6 kg | 650 mm | EX Controller | 500 mm | IP65 | 46.25 ° | P31 | Quattro 650H, IP65, P31, complémentaire |
|
|
|
6 kg | 650 mm | EX Controller | 500 mm | IP65 | 92.5 ° | P32 | Quattro 650H, IP65, P32, complémentaire |
|
|
|
6 kg | 650 mm | EX Controller | 500 mm | IP65 | 185 ° | P34 | Quattro 650H, IP65, P34, complémentaire |
|
|
|
10 kg | 800 mm | EX Controller | 500 mm | IP20 | 0 ° | P30 | Robot Quattro ePLC800H P30 (complémentaire), rotation 0°, 10 kg de charge utile, portée 1 600 mm de dia., axe Z 500 mm, base IP65, outillage, IP67 |
|
|
|
4 kg | 800 mm | EX Controller | 500 mm | IP20 | 46.25 ° | P31 | Robot Quattro ePLC800H P31 (complémentaire), rotation 46,25º, 4 kg de charge utile, portée 1 600 mm de dia., axe Z 500 mm, base IP65, outillage IP67 |
|
|
|
4 kg | 800 mm | EX Controller | 500 mm | IP20 | 92.5 ° | P32 | Quattro 800H, module complémentaire, charge utile de 4 kg, portée de 1600 mm de diamètre, P32, rotation de 92,5°, 4 axes, axe Z 500 mm, base IP20, outillage IP67, ePLC |
|
|
|
4 kg | 800 mm | EX Controller | 500 mm | IP20 | 185 ° | P34 | Robot Quattro ePLC800H P34 (complémentaire), rotation 185º, 4 kg de charge utile, portée 1 600 mm de diamètre, axe Z 500 mm, base IP65, outillage IP67 |
|
|
|
7 kg | 800 mm | EX Controller | 500 mm | IP67 | 0 ° | P30 | Quattro 800HS, USDA, P30, complémentaire |
|
|
|
1 kg | 800 mm | EX Controller | 500 mm | IP67 | 46.25 ° | P31 | Quattro 800HS, USDA, P31, complémentaire |
|
|
|
1 kg | 800 mm | EX Controller | 500 mm | IP67 | 92.5 ° | P32 | Quattro 800HS, USDA, P32, complémentaire |
|
|
|
1 kg | 800 mm | EX Controller | 500 mm | IP67 | 185 ° | P34 | Quattro 800HS, USDA, P34, complémentaire |
|
Accessoires
Ordering information
| Apperance | Type | Name/Specifications | Order code |
|---|---|---|---|
 |
Robot Integrated Controller | 16 motion axis, up to 8 robots control | NJ501-R300 |
| 32 motion axis, up to 8 robots control | NJ501-R400 | ||
| 64 motion axis, up to 8 robots control | NJ501-R500 | ||
 |
Robot Controller | SmartController EX | 19200-000 |
| SmartController EX + Front Panel | 19300-000 | ||
 |
Pendant | T20 Pendant with 10 m Cable | 10046-010 |
| T20 Pendant-Jumper Plug | 10048-000 | ||
| T20 Pendant Wall Bracket | 10079-000 | ||
| T20 Adapter Cable, 3 m | 10051-003 | ||
 |
Vision Controller | IPC Application Controller | AC1-152000 |
 |
Camera | GigE PoE, 1602 x 1202 pixels, 60 fps, Monochrome, CMOS (1/1.8-inch equivalent), camera cables included (10 m) | 24114-250 |
| GigE PoE, 1602 x 1202 pixels, 60 fps, Color, CMOS (1/1.8-inch equivalent), camera cables included (10 m) | 24114-251 | ||
| GigE PoE, 2048 x 2048 pixels, 25 fps, Monochrome, CMOS (1-inch equivalent), camera cables included (10 m) | 24114-300 | ||
| GigE PoE, 2048 x 2048 pixels, 25 fps, Color, CMOS (1-inch equivalent), camera cables included (10 m) | 24114-301 | ||
| Belt Encoder (Conveyor-Tracking) |
Encoder Kit IP65 | 09742-001 | |
| Y-Adapter Cable, 3 m | 09443-000 | ||
| Encoder Extension Cable, 5 m | 09446-050 | ||
| SCEX-BELT,Y-Adapter Cable, 0.5 m | 09550-000 | ||
| XBELTIO Cable, 0.6 m | 13463-000 | ||
| Additional I/O Options | IO Blox (connect to robot), 8 inputs/8 outputs, cables included (0.3 m) | 90356-30200 | |
| IO Block (connect to previous IO Blox), 8 inputs/8 outputs, cables included (0.3 m) | 90356-30100 | ||
| IO Blox-to-robot Cable, 3 m | 04677-030 | ||
| IO Blox-to-IO Blox Cable, 3 m | 04679-030 | ||
| IO Blox-to-IO Blox Cable, 0.3 m | 04679-003 | ||
| XIO Termination Block, 12 inputs/8 outputs, cables included (1.8 m) | 90356-40100 | ||
| XDIO Termination Block, 50 pin, cables included (2 m) | 09747-000 | ||
 |
Front Panel | Front Panel with 3 m cable | 90356-10358 |
| Front Panel Cable, 3 m | 10356-10500 | ||
| Power Supply/Cable | AC Power Cable, 5 m | 04118-000 | |
| 24 VDC Power Cable, 5 m | 04120-000 | ||
| 24 VDC, 6.5 A, 150 W (Front Mounting), Power Supply | S8FS-G15024C
2
Refer to the Switch Mode Power Supply Datasheet
(Cat.No.T207) for details. |
||
| 24 VDC, 6.5 A, 150 W (DIN-Rail Mounting), Power Supply | S8FS-G15024CD
2
Refer to the Switch Mode Power Supply Datasheet
(Cat.No.T207) for details. |
||
| 1394 Cable, 4.5 m | 13632-045 | ||
| eAIB XSYSTEM Cable Assembly, 1.8 m | 13323-000 | ||
| DB9 Splitter, 0.3 m | 00411-000 | ||
| eAIB XSYS Cable, 4.5 m | 11585-000 | ||
| Ethernet Cable | XS6W-6LSZH8SS
2
Refer
to the Industrial Ethernet Cables Catalog (Cat.No.G019) for details. |
||
| Industrial Switching Hubs | W4S1-05C
2
Refer
to the Industrial Switching Hubs Catalog (Cat.No.V227) for details. |
||
| Solenoid Valve Kit | eCobra robots (600, 800, 800 Inverted) | 02853-000 | |
| Cable Seal Kit | Hornet 565 IP65/67, Quattro 650HS IP65/67, Quattro 800HS IP65/67 | 08765-000 | |
| Quattro 650HS Standard, Quattro 800HS Standard | 09564-000 | ||
| eCobra 800 IP65/67 | 04813-000 | ||
| eCobra 800 Inverted IP65 | 09073-000 | ||
 |
ACE License | Automation Control Environment (for ACE 4.x) | Please download it from following URL: http://www.adept.com/Robots-Tool |
| ACE PackXpert (for ACE 4.x) | 20409-000 | ||
| ACE Sight Vision Software (for ACE 4.x) | 20410-000 | ||
| ACE PackXpert with ACE Sight Vision (for ACE 4.x) This license contains an ACE PackXpert license and an ACE Sight license. |
20433-000 | ||
 |
Related Products | Machine Automation Controller NX/NY/NJ Series | NX/NY/NJ
2
Refer to the Sysmac Catalog (Cat.No.P072)
for details. |
| Automation Software Sysmac Studio | SYSMAC-SE2
2
Refer to the Sysmac Catalog (Cat.No.P072)
for details. |
||
| Collection of software functional componentsSysmac LibraryAdept Robot Control Library | SYSMAC-XR009
2
Refer
to the Sysmac Library Catalog (Cat.No.P106) for details. |
||
| Sysmac Studio 3D Simulation option | SYSMAC-SA4 |
||
Contact your Omron representative for lenses, lights, and licenses.
Sysmac Library
![]()
The Sysmac Library is a collection of software functional components that can be used in programs
for the NX/NY/NJ Machine Automation Controllers.Please download it from following URL and install to Sysmac Studio Automation Software.http://www.ia.omron.com/sysmac_library/The Adept Robot Control Library allows you to control Delta, Articulated and SCARA robots manufactured
by Omron Adept Technologies Inc. from the NX/NY/NJ Machine Automation Controller by using the same
instructions and programming methods.
Besoin d'aide ?
Nous sommes là pour vous aider ! Contactez-nous et nos spécialistes vous aideront à trouver la meilleure solution pour votre entreprise.
Contactez-moi Quattro

Merci de votre demande. Nous reviendrons vers vous dès que possible.
Nous rencontrons des problèmes techniques. Votre demande ne peut être traitée. Veuillez nous excuser et ré-essayer plus tard. Détails :
Devis pour Quattro
Vous pouvez utiliser ce formulaire pour demander un devis sur le produit de votre choix. Merci de compléter tous les champs *. Les informations sont traitées de manière confidentielle.
Merci de votre demande. Nous vous enverrons l'information demandée au plus tôt.
Nous rencontrons des problèmes techniques. Votre demande ne peut être traitée. Veuillez nous excuser et ré-essayer plus tard. Détails :
Série de robots Delta
Quattro 800H
- Plage de fonctionnement nominale : ø 1 600 x 215 mm (Max. 500 mm)
- Plage de charge utile max. : 4 à 10 kg
- Nombre d'axes : 4
- IP65 (avec kit d'étanchéité de câble en option)
Quattro 650H/HS
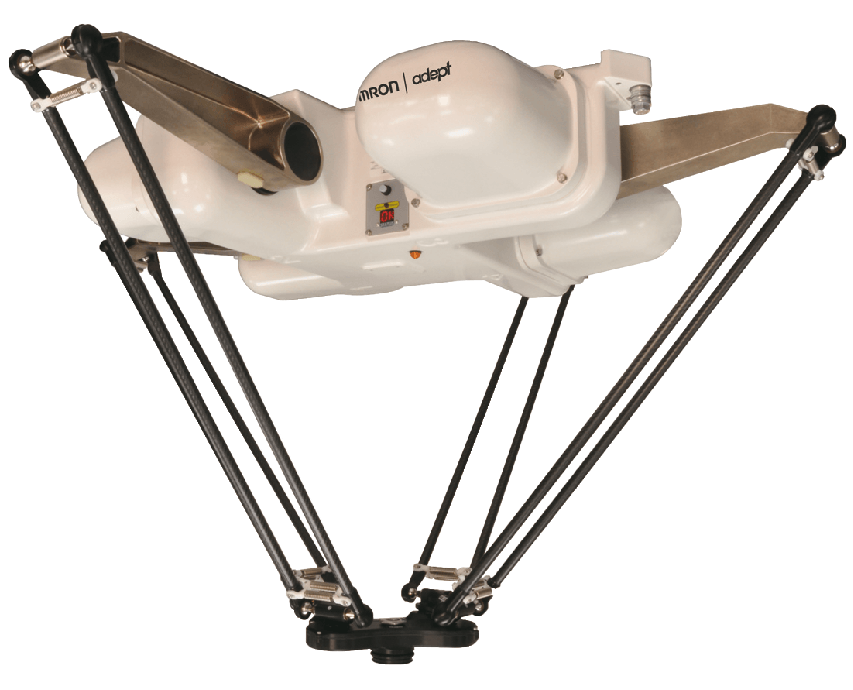
- Plage de fonctionnement nominale : ø 1 300 x 215 mm (Max. 500 mm)
- Plage de charge utile max. : 3 à 15 kg
- Nombre d'axes : 4
- IP65 (avec kit d'étanchéité de câble en option), modèle HS IP66
- Le robot Quattro 650HS est agréé par l'USDA pour la manipulation des denrées alimentaires primaires
Unités de contrôle
Vidéos

-

Omron PackXpert: complete packaging solution
A complete single source integrated solution: robot, vision, motion, design & control. Manage your packaging line on your own with an intuitive, graphical interface. PackXpert Solution brings together our complete line of robotic automation products into a single, fully integrated packaging system. From design to implementation to product changeovers, with PackXpert, you’ll save time, lower costs and reduce the complexity of your packaging line.
01:21
Omron PackXpert: complete packaging solution
A complete single source integrated solution: robot, vision, motion, design & control. Manage your packaging line on your own with an intuitive, graphical interface. PackXpert Solution brings together our complete line of robotic automation products into a single, fully integrated packaging system. From design to implementation to product changeovers, with PackXpert, you’ll save time, lower costs and reduce the complexity of your packaging line.Produits liés
-

Robot parallèle idéal pour les applications agroalimentaires, pharmaceutiques et médicales
-

Le robot parallèle idéal pour les secteurs agroalimentaires, pharmaceutiques et médicaux
-

Le robot parallèle à quatre axes permet d'atteindre une vitesse élevée et une haute précision
Téléchargements







_getting_started_guide_en.jpg)


_users_manual_en.jpg)














